node-red-contrib-socketcan 1.4.2
node-red nodes for socketcan
node-red-contrib-socketcan
Credits: Built upon https://github.com/sebi2k1/node-can which is a very good nodejs socketcan implementation. Thanks to Sebastian Hildebrandt for that.
This is a couple of nodes to read CAN frames from and send CAN frames to a CAN bus using socketcan. Socketcan is the standard CAN subsystem on Linux. Socketcan is not available on Windows.
This project is inspired by node-red-contrib-canbus (Rajesh Sola [email protected]) which almost did what I needed but not quite.
can-utils is a good set of companion tools when working with socketcan.
Some info about bringing a (virtual) CAN interface up is here. If you need real CAN hardware TouCAN is a good choice (no affiliation except for using it myself).
This project is part of the VSCP (https://www.vscp.org) project.
Install
Go to node-red folder and
npm install node-red-contrib-socketcan
or install in node-red palette.
Sending CAN frames
socketcan-in node is provided for sending CAN frames. You can send standard or extended id frames, FD frames are supported.
Set up the interface to some real CAN hardware or use a virtual interface.
payload
Object/JSON formated message
The CAN message is defined as a JSON object with the following payload format
{
"canfd":false,
"ext":false,
"rtr":false,
"canid":123,
"dlc":5,
"data":[1,2,3,4,5]
}
- canfd - Marks the frame as a CAN-FD frame.
- ext - Marks the message as an extended id message.
- rtr - The message is a remote transmission request. No data should be specified in this case (set to null).
- canid - The canid for the CAN message. Must be less then 0x7ff for a standard CAN message.
- dlc - Number of databytes, 0-64.
- data - An array, comma separated list or buffer with data bytes. Set to null if no data.
String formated messages
The CAN message is defined as a string with the following payload format
<canid>#{R|data}
- canid - Less than 0x7ff and with less than three digits for a standard id. Always defined in hex format.
- data - The data part for the can frame. Always in hex format.
- R - Specifies a remote transmission request frame.
Examples
123#DEADBEEF - standard frame
5AA# - Standard frame no data
1F334455#1122334455667788 - extended frame
123#R - for remote transmission request.
123## - FD frame no data
123##AA - FD frame standard
Receiving CAN frames
socketcan-out node is provided for receiving CAN frames. You can receive standard or extended CAN id frames.
Set up the interface to some real CAN hardware or use a virtual interface.
Payload
The payload is always a Javascript object on the following form.
{ "err": false, timestamp: 1552881174, ext: 0, rtr: 0, canid: 123, dlc: 5, data: [1,2,3,4,5] }
- canid - The standard or extended can id.
- ext - Set to true if this is a extended id frame. False otherwise.
- rtr - Specifies a remote transmission request frame if set to true.
- dlc - Number of databytes.
- data - An array with data or null or an empty array if no data.
- rawData - Holds frame data on buffer format for convinience.
- err - Marks the frame as an error frame. canid will hold the error code in this case. Normally no data.
The timestamp (in microseconds) is generated by the node if not supplied by the interface.
Error codes are defined in the Linux kernel header file can/error.h
- CAN_ERR_TX_TIMEOUT = 0x00000001 // TX timeout
- CAN_ERR_LOSTARB = 0x00000002 // Lost arbitration
- CAN_ERR_CRTL = 0x00000004 // Controller problems
- CAN_ERR_PROT = 0x00000008 // Protocol violations
- CAN_ERR_TRX = 0x00000010 // Transceiver status
- CAN_ERR_ACK = 0x00000020 // No ACK received
- CAN_ERR_BUSOFF = 0x00000040 // Bus off
- CAN_ERR_BUSERROR = 0x00000080 // Bus error
- CAN_ERR_RESTARTED = 0x00000100 // Controller restarted
Handling error frames
if (msg.payload.err) {
switch (msg.payload.canid) {
case 0x00000040:
console.log('Bus off condition');
break;
// etc...
}
}
Manual recovery

The socketcan-recover node allows you to manually trigger a socket reconnect on a CAN interface without restarting Node-RED. When triggered, it instructs all socketcan-in and socketcan-out nodes sharing the same config to drop their current socket connection and reconnect.
This is useful when a CAN bus goes into a bus-off state or otherwise becomes unresponsive, and you want to recover programmatically — for example, from an error-frame handler or a scheduled watchdog.
Input
Any message triggers recovery. You can optionally supply a reason string:
| Property | Type | Description |
|---|---|---|
msg.reason |
string | Optional reason for the recovery (logged/passed through). |
msg.payload |
string or object | If msg.reason is not set, a string payload or msg.payload.reason is used as the reason. |
Output
The input message is forwarded with an added msg.socketcan object:
{
"interface": "vcan0",
"recoveryRequested": true,
"reason": "manual recovery",
"timestamp": 1718400000000
}
Example: recover on bus-off
Wire a socketcan-out (receive) node into a function node that checks for bus-off errors, then connect it to a socketcan-recover node on the same config:
// Function node: detect bus-off and trigger recovery
if (msg.payload.err && msg.payload.canid === 0x00000040) {
msg.reason = "bus-off detected";
return msg;
}
return null;
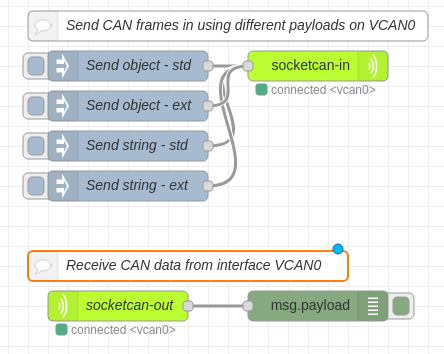
Example flow
Enable a virtual CAN interface with
$ modprobe vcan
$ sudo ip link add dev vcan0 type vcan
$ sudo ip link set up vcan0
install can-utils with
sudo apt install can-utils
Receive CAN frames with
candump vcan0
Send CAN frames with
cansend vcan0 123#1122334455
Use this flow to interact with the other tools.
[
{
"id": "829af3ee.a57c1",
"type": "tab",
"label": "Flow 1",
"disabled": false,
"info": ""
},
{
"id": "b2855d5b.1215c8",
"type": "socketcan-config",
"z": "",
"interface": "can0"
},
{
"id": "38e8307.1653f5",
"type": "socketcan-config",
"z": "",
"interface": "vcan0"
},
{
"id": "7b24a62e.8f5458",
"type": "debug",
"z": "829af3ee.a57c1",
"name": "",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 350,
"y": 360,
"wires": []
},
{
"id": "5f671b29.cd24bc",
"type": "socketcan-out",
"z": "829af3ee.a57c1",
"name": "socketcan-out",
"config": "38e8307.1653f5",
"x": 150,
"y": 360,
"wires": [
[
"7b24a62e.8f5458"
]
]
},
{
"id": "caba412f.047b2",
"type": "socketcan-in",
"z": "829af3ee.a57c1",
"name": "socketcan-out",
"config": "38e8307.1653f5",
"x": 360,
"y": 120,
"wires": []
},
{
"id": "a64240cb.3f0788",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send object - std",
"topic": "",
"payload": "{\"ext\":false,\"canid\":123,\"dlc\":5,\"data\":[1,2,3,4,5]}",
"payloadType": "json",
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"x": 160,
"y": 120,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "3ff96369.ef6f5c",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send string - std",
"topic": "",
"payload": "123#00112233",
"payloadType": "str",
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"x": 160,
"y": 200,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "6879c00a.5edb68",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send string - ext",
"topic": "",
"payload": "1F334455#1122334455667788",
"payloadType": "str",
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"x": 160,
"y": 240,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "1ee3b274.4cb8fe",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send object - ext",
"topic": "",
"payload": "{\"ext\":true,\"canid\":32278,\"dlc\":5,\"data\":[1,2,3,4,5]}",
"payloadType": "json",
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"x": 160,
"y": 160,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "391a4c45.7acd8c",
"type": "comment",
"z": "829af3ee.a57c1",
"name": "Send CAN frames in using different payloads on VCAN0",
"info": "",
"x": 260,
"y": 80,
"wires": []
},
{
"id": "912f9928.da2758",
"type": "comment",
"z": "829af3ee.a57c1",
"name": "Receiove CAN data from interface VCAN0",
"info": "",
"x": 220,
"y": 320,
"wires": []
}
]
Debugging
It is possible to get extra debug information from the nodes in this package.
Issue
export NODE_DEBUG=socketcan-in
before starting node-red to get extra debug info for the socketcan-in node.
Issue
export NODE_DEBUG=socketcan-out
before starting node-red to get extra debug info for the socketcan-out node.
Issue
export NODE_DEBUG=socketcan-in socketcan-out
before starting node-red to get extra debug info for both the socketcan-in and socketcan-out node.
Issue
export NODE_DEBUG=socketcan-recover
before starting node-red to get extra debug info for the socketcan-recover node.
Copyright © 2020-2026 Ake Hedman, Grodans Paradis AB - MIT License