@pizzaprogram/mcp-pcf-aio 2.3.8-20220907
Node-Red node for multiple MCP23017 chips (each 16 input or output) + PCF8574(A) (8 I/O). The I2C Bus number can be specified too.
A Node-Red node for the MCP23017 & PCF8574 chips
- About Node-Red link...
- Link for the MCP chip itself
- Chip specs. PDF
- Link for the PCF chip itself
- Chip specs. PDF
- Node-RED node
- Github source
- Forum discussion
Code Language:
About
It uses the config node "mcp_pcf_chip" for all reading and writing on i2c bus
More about I2C...
- Each pin (8 or 16 in total) can be individually selected to be an input or output
- You can place as many Nodes to your flows as many pins you use, or
- you can also set 1-1 node only pro 0-7 or 8-15 and control via
msg.pinandmsg.stateifmsg.payload=-1 - 4 states are showed of a node:
On=greenOff=greyUninitialised=yellowError=red
Requires 'i2c-bus' module. link...
( It gets automatically installed, except if you want to use it directly from function nodes. )
Inputs
WARNING: input interrupts part of this component is experimental.
- it reads inputs non-stop, can be set milisec value (a bit higher CPU usage)
- it might starts multiple timers that interfere with each other? (Needs investigation.)
- to minimize state-refresh problem there is secondary "de-bounce" timer
Config
Each node has a global Main-Chip, that can be configured with "I2C bus number" + "Chip Address". (The PCF8574(A) chips are showed currently with an Address multiplied by 2. Like: 0x21 * 2 = 0x42 )
Interval: is used to determine how frequently all inputs are polled. ( Reads all 8+8 ports from bank A+B. )
! Should be minimum 20ms, because a read process of 16 pins takes 12-14ms on a Raspberry Pi 4.Bit: is a number from 0 to 15 reflecting the pin (0-7 at FCP8574 chips) If "All0" or "All1" is recieved, the bit becames: -1 in logs.
Pull Up: engages the low power pull up resistor. More: https://en.wikipedia.org/wiki/Pull-up_resistor
(Inputs only.)Debounce: is a timer where the state must remain at the new level for the specified time (millisec)
(Inputs only.)
( It will filter out too short changes, like sparkles. )Invert is a software-override for both Input + Output pins. It will show and act the opposite way of On/Off.
0>>1 , 1>>0
( For example some relay boards are "closing = pulling" if they get GND instead of 5V on their pins,
so they need to be negated with resistors. In those cases the chip must get 0x00 to "turn on". )Start All Outputs High: when node-red is started and first chip gets inicialized, it will send a 0xFFFF signal to all pins, so they
Known problems:
- After disconnected of cable or USB-I2C adapter the readouts can not properly restore unless restarting the whole flow.
- Multiple Main-chip-setup-nodes can be set to same Address, causing conflicts. (No pre-error or pre-warning happens.)
- -- fixed 2022-03-26
- It changes the On-Off state visually of the Node while it's not that node changed when using direct-msg-control
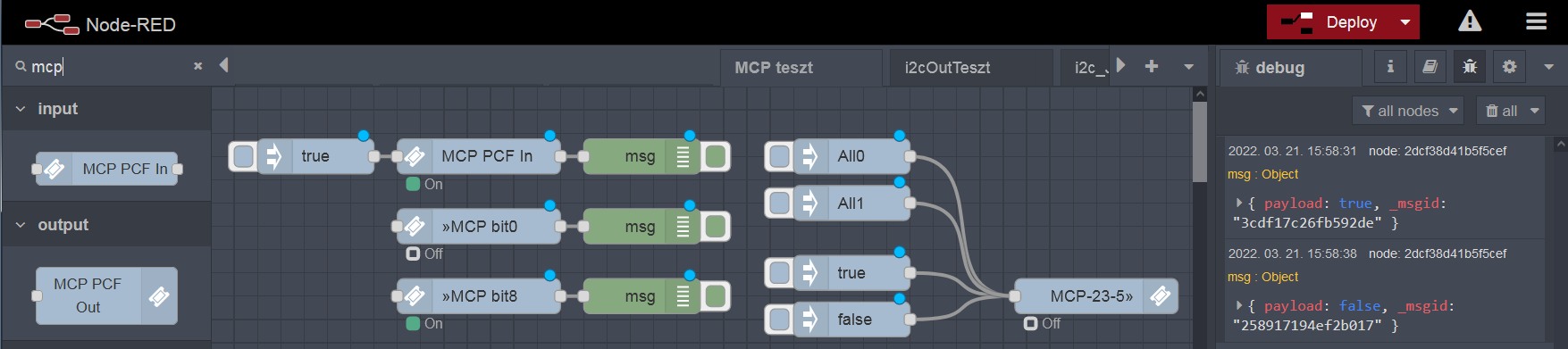
- Sending "All0" or "All1" to an MCP node turns on only 0-7 pins, if Bit of Nodes are only set to 0-7. Solution: Set Bit of the node at setup to 8-15 to turn ALL!
To Do
- Don't even allow already selected bits to be selected again (not just error reporting about)
- When a node is deleted or disabled - remove from ids (array in chip) --- half done at 2022-03-19 version
- Block RW operations happening at the same time... (rework everything to Async / await and atomic flags)
- Analize further how interrupts are dealt with in C code and write it in s/mcp23017)
- Don't allow to create multiple main chips with the same address (MCP + PCF can be on the same address accidentally)
Credit
Thanks to Mike Wilson for the original v0.1 node: MCP23017chip
Change Log 2022-09-07 (Y-M-D) Version: 2.3.8.20220907
by László Szakmári (www.pizzaprogram.hu)
- Changed Interrupt initialization of the MCP chips: (EXPERIMENTAL! Testing needed.) MIRROR=1 << If any of A or B input IO-bank pin changed, both INTA and INTB is triggered ODR=1 << Not only "Active-Low" state, but both "High/Low" input changes are triggered
Change Log 2022-06-07 (Y-M-D) Version: 2.3.7.20220607
by László Szakmári (www.pizzaprogram.hu)
WARNING! Naming of commands and msg values changed !!! (No more Capital beginnings.)
"All0"->"all0""All1"->"all1"msg.AllStatesRaw->msg.allStatesRaw... also fixed name convention at source code, likeOnOFF->on_offRead more hereIf read-interval is set to 0 it will clear any running timer.
Change Log 2022-06-06 (Y-M-D) Version: 2.3.6.20220606
by László Szakmári (www.pizzaprogram.hu)
BUG Fix: Too long read time caused a (.warning) error instead of increasing the timer interval x2.
Enh.: If the last read time is shorter than interval, it resumes the timer at original interval.
Change Log 2022-03-26 (Y-M-D) Version: 2.3.5.20220326
by László Szakmári (www.pizzaprogram.hu)
PCF chips show now correct Address -at Main-Chip setup. Fixed.
Fixed "interval too short" auto-increase happaning if "interrupt-triggered" read occures
- Added examples
Change Log 2022-03-25 (Y-M-D) Version: 2.3.3.20220325
by László Szakmári (www.pizzaprogram.hu)
- Changed
msg.pinandmsg.stateto lower case.
Change Log 2022-03-22 (Y-M-D) Version: 2.3.2.20220322
by László Szakmári (www.pizzaprogram.hu)
you can set 1-1 node only pro 0-7 or 8-15 and control via
msg.Pin=andmsg.State=ifmsg.Payload=-1fixed
consol.warningbug if Timer set = 0ms.
Change Log 2022-03-21 (Y-M-D) Version: 2.3.1.20220321
by László Szakmári (www.pizzaprogram.hu)
- Fixed bug: on input change payload was always "true".
Change Log 2022-03-19 (Y-M-D) Version: 2.3.0.20220319
by László Szakmári (www.pizzaprogram.hu)
FIRST OFFICIAL RELEASE
Enhanced html help of the node
fixed bugs (like: partial Deploy did not clear prev. instances from context)
Change Log 2022-03-03 (Y-M-D) Version: 2.3.0.20220303
by László Szakmári (www.pizzaprogram.hu)
Added PCF8574 + PCF8574A chip support. Both In + Out.
Fixed Naming of PFC... to PCF... (the original code was spelled wrong).
Detailed Logging to consol can be turned on/off with
const log2consol = False;andtimerLog = false;Fixed Input Bugs. Now stable.
Fixed bug if same chip had both in+out pins mixed.
Fixed crashing of Node-red if chip or I2C bus was suddenly removed from system.
Inject (Interrupt) trigger adds extra values to msg. [] ... see help
New Github upload. (PFC false-named one got deleted)
Change Log 2021-01-11 (Y-M-D)
by László Szakmári (www.pizzaprogram.hu)
!!! IMPORTANT CHANGE: -- [ x ] Inverse is now affecting Output too ! (Some relay boards are functioning "the opposite way", turning ON if pin is Low.)
Changed Bus open/close behaviour. Separate open before/after each read/write operation block. (This way no more non-stop opened bus > no more NodeRed crash if unexpected disconnect.)
Fixed other NR crashes: Added Error handling (try - catch) for each i2c bus operation. Each operation has it's own value to report proper error text. (Like: "Bus opening failed", ... etc) (But execution time increased from 8ms to 12ms on Raspberri 4)
Fixed 16pin array initialization (16x null)
Added multiple/same pin initialization error handling. (Highlander: "There Can Be Only One" :-D )
Added lots of comments and constants to JS file (like IOCON, IODIR_A, etc...)
Changed icon to a chip-like one. (font-awesome/fa-ticket)
Faster initialisation: if set to output >> skips pullup & invert writes.
Prevents the input-timer to run if the previous function is still running.
+2 states of a node and color change of Off: On=green Off=grey Uninitialised=yellow Error=red
Does not starting input-timer, if there are no input nodes available.
Auto-increasing read-interval if < 15ms or if reading took too long.
If error occured during read-timer >> changing interval to 5 sec >> if normal again >> changing back
Dokument + Code changes: -- Pretty print of JS code (inline) -- All local variables start now with _underline -- Many comments + constants + references added to code -- Fixed help in mcp_pcf_chip.html file
Change Log 2021-09-12 (Y-M-D)
Fixed input
Add input trigger to handle interrupts. If msg.payload = True >> and succesfully read
msg.immediateReadSuccess = true. If any error:Result = false
Limit debounce timeing to max = interval - 20ms
debounce is not starting if =0
Change Log 2021-11-11 (Y-M-D)
- Node name changed from MCP23017chip to current ,mcp_pfc_aio v2.1.0 ( AIO = All in One IO = Input Output )