node-red-contrib-controltimer 0.4.1
A controllable Node-RED timer node. Start, Stop, Reset, Pause and Continue the timer. Use the timer as a loop or a delay.
node-red-contrib-controltimer
Overview
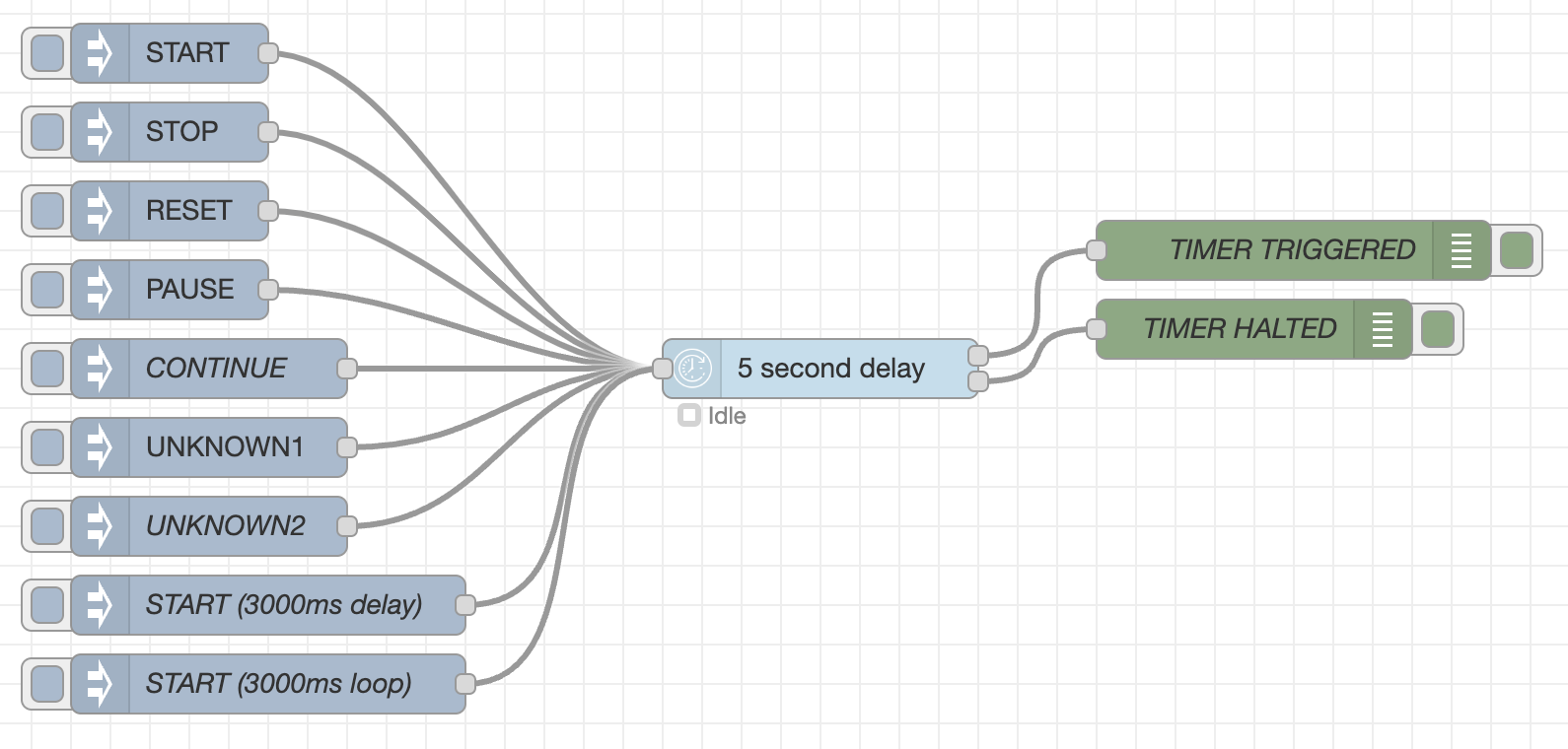
The node-red-contrib-controltimer is a versatile Node-RED timer node that supports both looping and delay behavior. It allows interaction through action messages, enabling actions such as starting, resetting, stopping, pausing, and continuing the timer. This node has two outputs: the first one emits a message when the timer is triggered (either the delay expires or the interval is reached), while the second one emits a message when the running timer is stopped or paused.
The timer can be explicitly reset by using the RESET action, causing it to restart the countdown from the beginning. Alternatively, if the Reset timer on reception of START action option is enabled, sending a START action will also reset the timer. Moreover, when the Reset timer on reception of unknown message option is enabled, the timer will be reset upon receiving an unknown message.
Both looping and delay behavior timers can be paused and later resumed. When resumed, they will continue counting down from the remaining duration.
To aid in debugging or gain an overview of the timer's progress, you can enable the Is running timer progress visible option. This will display the timer's progress as a percentage of the total duration in the node's status area.
Additionally, you have the flexibility to disable specific actions for the node. For example, you can disable the RESET, PAUSE, and CONTINUE actions. In such cases, when the node receives any of the aforementioned actions, it will treat them as unknown messages.
Override configuration
Initiate the timer with overridden configuration by using the START command. Include the properties timerType, timerDuration, and timerDurationUnit in the message to override them. The timer's control functionalities (pausing, continuing, resetting) also work while in override mode.
Note that the reconfigured values are ephemeral and not saved to the node's configuration. They remain active until the timer is manually stopped or completes its cycle. Once the timer is stopped or completes, it will revert back to the values specified in the node's configuration.
When you override the configuration of a node, the information displayed on the node itself will not be updated. However, the Controltimer will run based on the configuration you have provided. To confirm that the controltimer is running according to your sent configuration, check the timer progress status below the node.
{
payload: 'START',
timerType: 'delay', // 'delay', 'loop'
timerDuration: 3000,
timerDurationUnit: 'millisecond', // 'millisecond', 'second', 'minute', 'hour'
}
Example flow diagram
Copy-Paste this flow to Node-RED to test it out yourself.
[
{
"id": "afd749500f2d393d",
"type": "tab",
"label": "ControlTimer Example",
"disabled": false,
"info": ""
},
{
"id": "79276f6f06e96f24",
"type": "inject",
"z": "afd749500f2d393d",
"name": "",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "START",
"payloadType": "str",
"x": 110,
"y": 40,
"wires": [["44e6d3eefa84eb4d"]]
},
{
"id": "1ae1e3ee2f5250a6",
"type": "debug",
"z": "afd749500f2d393d",
"name": "TIMER TRIGGERED",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "true",
"targetType": "full",
"statusVal": "",
"statusType": "auto",
"x": 680,
"y": 140,
"wires": []
},
{
"id": "9711419041494ee9",
"type": "inject",
"z": "afd749500f2d393d",
"name": "",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "STOP",
"payloadType": "str",
"x": 110,
"y": 80,
"wires": [["44e6d3eefa84eb4d"]]
},
{
"id": "2db5a47c85a55778",
"type": "inject",
"z": "afd749500f2d393d",
"name": "",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "RESET",
"payloadType": "str",
"x": 110,
"y": 120,
"wires": [["44e6d3eefa84eb4d"]]
},
{
"id": "52882ab466bde0a2",
"type": "inject",
"z": "afd749500f2d393d",
"name": "",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "PAUSE",
"payloadType": "str",
"x": 110,
"y": 160,
"wires": [["44e6d3eefa84eb4d"]]
},
{
"id": "5acb4a13897dfe33",
"type": "inject",
"z": "afd749500f2d393d",
"name": "CONTINUE",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "CONTINUE",
"payloadType": "str",
"x": 130,
"y": 200,
"wires": [["44e6d3eefa84eb4d"]]
},
{
"id": "5c9aea117d0cb988",
"type": "debug",
"z": "afd749500f2d393d",
"name": "TIMER HALTED",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "true",
"targetType": "full",
"statusVal": "",
"statusType": "auto",
"x": 660,
"y": 180,
"wires": []
},
{
"id": "bbd756d4850041fa",
"type": "inject",
"z": "afd749500f2d393d",
"name": "",
"props": [
{
"p": "payload"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "UNKNOWN1",
"payloadType": "str",
"x": 130,
"y": 240,
"wires": [["44e6d3eefa84eb4d"]]
},
{
"id": "76203a31872dca18",
"type": "inject",
"z": "afd749500f2d393d",
"name": "UNKNOWN2",
"props": [
{
"p": "unknown",
"v": "UNKNOWN2",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"x": 130,
"y": 280,
"wires": [["44e6d3eefa84eb4d"]]
},
{
"id": "01f89a1a0cfa1eb2",
"type": "inject",
"z": "afd749500f2d393d",
"name": "START (3000ms delay)",
"props": [
{
"p": "payload"
},
{
"p": "timerType",
"v": "delay",
"vt": "str"
},
{
"p": "timerDuration",
"v": "3000",
"vt": "num"
},
{
"p": "timerDurationUnit",
"v": "millisecond",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "START",
"payloadType": "str",
"x": 160,
"y": 320,
"wires": [["44e6d3eefa84eb4d"]]
},
{
"id": "c96f33f73a45a2a0",
"type": "inject",
"z": "afd749500f2d393d",
"name": "START (3000ms loop)",
"props": [
{
"p": "payload"
},
{
"p": "timerType",
"v": "loop",
"vt": "str"
},
{
"p": "timerDuration",
"v": "3000",
"vt": "num"
},
{
"p": "timerDurationUnit",
"v": "millisecond",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "START",
"payloadType": "str",
"x": 160,
"y": 360,
"wires": [["44e6d3eefa84eb4d"]]
},
{
"id": "44e6d3eefa84eb4d",
"type": "controltimer",
"z": "afd749500f2d393d",
"name": "",
"timerType": "delay",
"timerDurationUnit": "minute",
"timerDurationType": "num",
"timerDuration": 1,
"timerLoopTimeoutUnit": "second",
"timerLoopTimeoutType": "num",
"timerLoopTimeout": 0,
"loopTimeoutMessageType": "str",
"loopTimeoutMessage": "LOOP_TIMEOUT",
"timerMaxLoopIterationsType": "num",
"timerMaxLoopIterations": 0,
"loopMaxIterationsMessageType": "str",
"loopMaxIterationsMessage": "MAX_LOOP_ITERATIONS",
"isRunningTimerProgressVisible": true,
"outputReceivedMessageOnTimerTrigger": true,
"outputReceivedMessageOnTimerHalt": false,
"startTimerOnReceivalOfUnknownMessage": false,
"resetTimerOnReceivalOfUnknownMessage": false,
"resetTimerOnReceivalOfStartAction": false,
"continueTimerOnReceivalOfStartAction": false,
"isDebugModeEnabled": false,
"timerTriggeredMessageType": "str",
"timerTriggeredMessage": "TIMER_TRIGGERED",
"timerHaltedMessageType": "str",
"timerHaltedMessage": "TIMER_HALTED",
"isStartActionEnabled": true,
"isStopActionEnabled": true,
"isResetActionEnabled": true,
"isPauseActionEnabled": true,
"isContinueActionEnabled": true,
"actionPropertyNameType": "str",
"actionPropertyName": "payload",
"startActionNameType": "str",
"startActionName": "START",
"stopActionNameType": "str",
"stopActionName": "STOP",
"resetActionNameType": "str",
"resetActionName": "RESET",
"pauseActionNameType": "str",
"pauseActionName": "PAUSE",
"continueActionNameType": "str",
"continueActionName": "CONTINUE",
"x": 440,
"y": 200,
"wires": [["1ae1e3ee2f5250a6"], ["5c9aea117d0cb988"]]
}
]
Installation
Change directory to your node red installation:
$ npm install --save node-red-contrib-controltimer
Configuration
| Option | Description | DEFAULT |
|---|---|---|
Timer type |
Defines the timer behaviour. Available options are Delay and Loop. |
Delay |
Timer duration unit |
Defines the timer duration unit. Available options are Milliseconds, Seconds, Minutes and Hours. |
Seconds |
Timer duration |
Defines the timer duration in specified (Timer duration unit) units. |
5 |
Loop timeout unit |
Defines timer loop timeout unit. Available options are Milliseconds, Seconds, Minutes and Hours. |
Seconds |
Loop timeout |
Defines the timer loop timeout in specified (Loop timeout unit) units. 0 means no timeout. |
0 |
Loop timeout message |
Defines message that is emitted via timer-halted output upon timeout. |
LOOP_TIMEOUT |
Loop max iterations |
Defines timer loop max iterations limit. 0 means no limit. |
0 |
Loop max iterations message |
Defines message that is emitted via timer-halted output upon max iterations are reached. |
MAX_LOOP_ITERATIONS |
Is running timer progress visible |
If true it will display the timer's progress in node's status area as percentages. A good option for debugging long running tasks. |
false |
Output received message on timer trigger |
If true it will emit the message the node received when timer triggers. If false it will emit an empty message. |
true |
Output received message on timer halt |
If true it will emit the message the node received when timer is halted. If false it will emit an empty message. |
true |
Start timer on receival of unknown message |
If true the timer is started upon receival of unknown* message |
false |
Reset timer on receival of unknown message |
If true the timer is reset upon receival of unknown* message |
false |
Reset timer on receival of START action |
If true the timer is reset upon receival of START action. |
false |
Continue timer on receival of START action |
If true the timer is continued upon receival of START action. |
false |
Is debug mode enabled |
If true node will log errors into debug console |
false |
Timer triggered message |
Defines message that is emitted via timer-triggered output when timer is triggered and if Output received message on timer trigger is not enabled. |
TIMER_TRIGGERED |
Timer triggered message |
Defines message that is emitted via timer-halted output when timer is halted and if Output received message on timer halt is not enabled. |
TIMER_HALTED |
Is start action enabled |
If true node is permitted to receive Start actions |
true |
Is stop action enabled |
If true node is permitted to receive Stop actions |
true |
Is reset action enabled |
If true node is permitted to receive Reset actions |
true |
Is pause action enabled |
If true node is permitted to receive Pause actions |
true |
Is continue action enabled |
If true node is permitted to receive Continue actions |
true |
Action property name |
Defines the property on a received message on which the action string to interact with timer can be found. | payload |
Start action name |
Defines the action string that will START the timer. |
START |
Stop action name |
Defines the action string that will STOP the timer. |
STOP |
Reset action name |
Defines the action string that will RESET the timer. |
RESET |
Pause action name |
Defines the action string that will PAUSE the timer. |
PAUSE |
Continue action name |
Defines the action string that will CONTINUE the paused timer. |
CONTINUE |
* An unknown message refers to a message with a payload that is not part of the defined and enabled set of action strings. For example, it could be a message without a defined Action property name or a message with a Action property name value that does not match any of the enabled action names. If a disabled action, such as the PAUSE action, is received, it is considered an unknown message according to the settings.