node-red-contrib-gpsd 1.0.8
A GPSd node for Node-RED
node-red-contrib-gpsd
A contributed Node-RED node, for retrieving data from a GPS Module via the GPSd Service Daemon.
Overview
The goal of this software is to make it easy for makers to incorporate the use of GPS modules into their IoT projects, via the awesome Node-RED Framework.
To do this, it leverages the great work of the GPSd Service Daemon. This software is relatively easy to install on a UNIX-like operating system, such as GNU/Linux (including Raspbian for Raspberry Pi), or BSD (and derivatives including macOS).
It also makes use of the node-gpsd npm module by Eelco Cramer
Installation
Install node-red-contrib-gpsd by following the
adding nodes
instructions from the
Node-RED Getting Started Documentation.
These instructions use npm.
Or if TL;DR, as the user running Node-RED type:
cd $HOME/.node-red
npm install node-red-contrib-gpsd
Usage
To use the node, launch or re-launch Node-RED (see running Node-RED for help getting started).
A gpsd example flow is available that highlights all the features of this node, and is illustrated below. You can copy and paste this flow into Node-RED and tinker to get a feel for how it works.
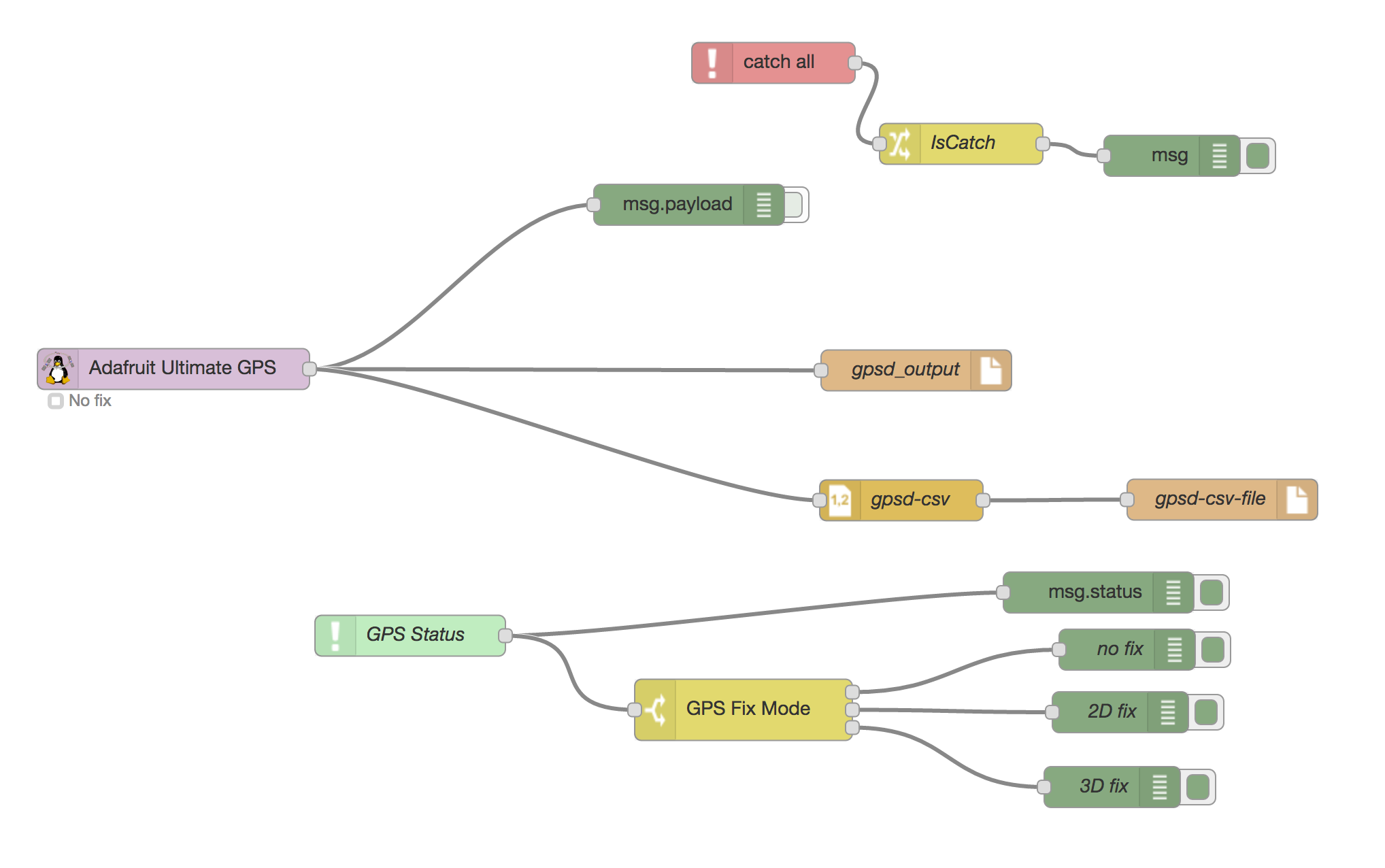
Or if you prefer, read the following explanation and screen shots.
The gpsd node’s configuration window contains the following options:
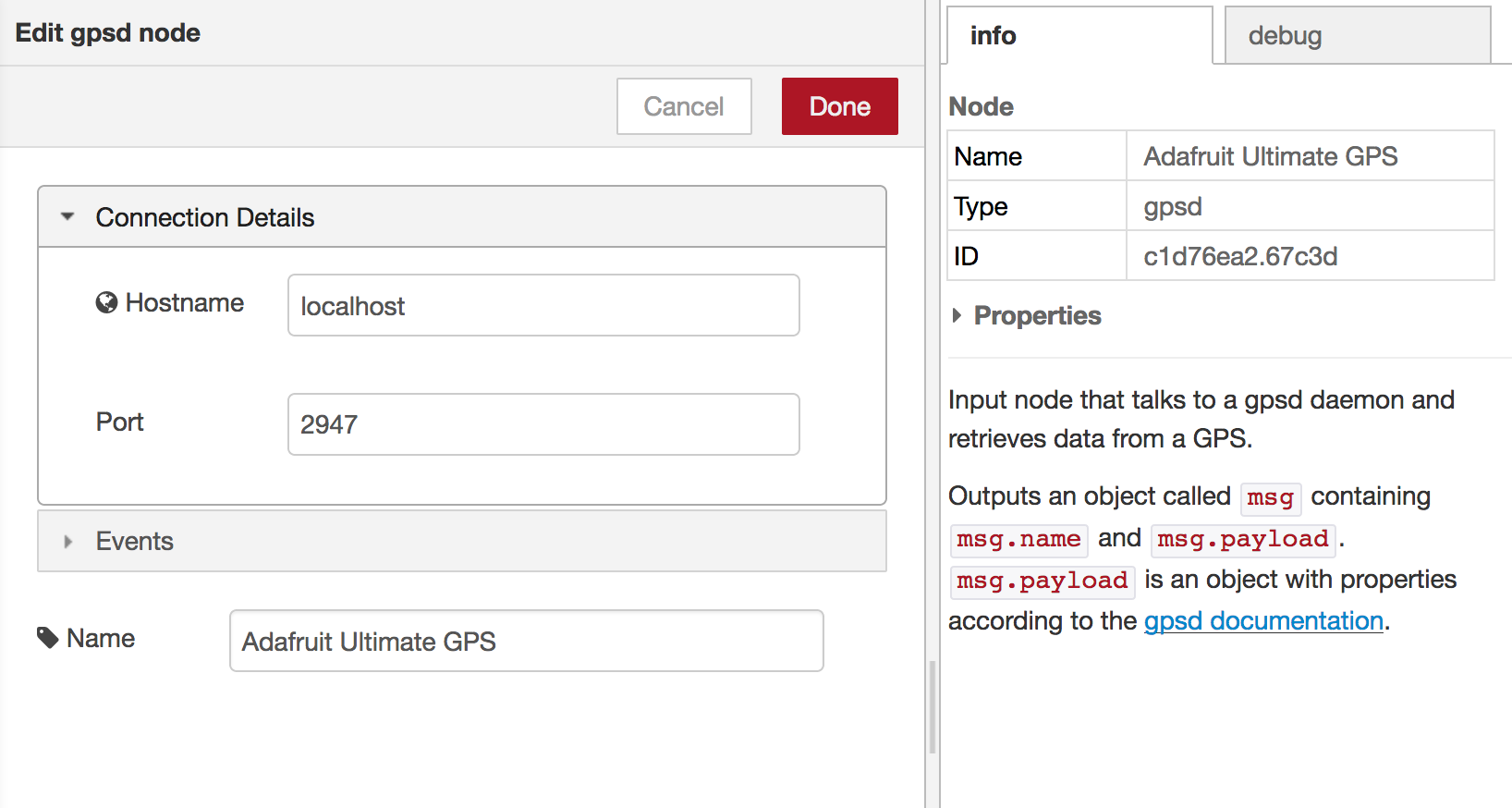
Connection Details
In this accordion, you specify which Internet host and port your GPSd daemon
is listening on. By default, it will use localhost and the default GPSd
port 2947. If your GPSd is running on another computer, enter the hostname or
IP address in the hostname field.
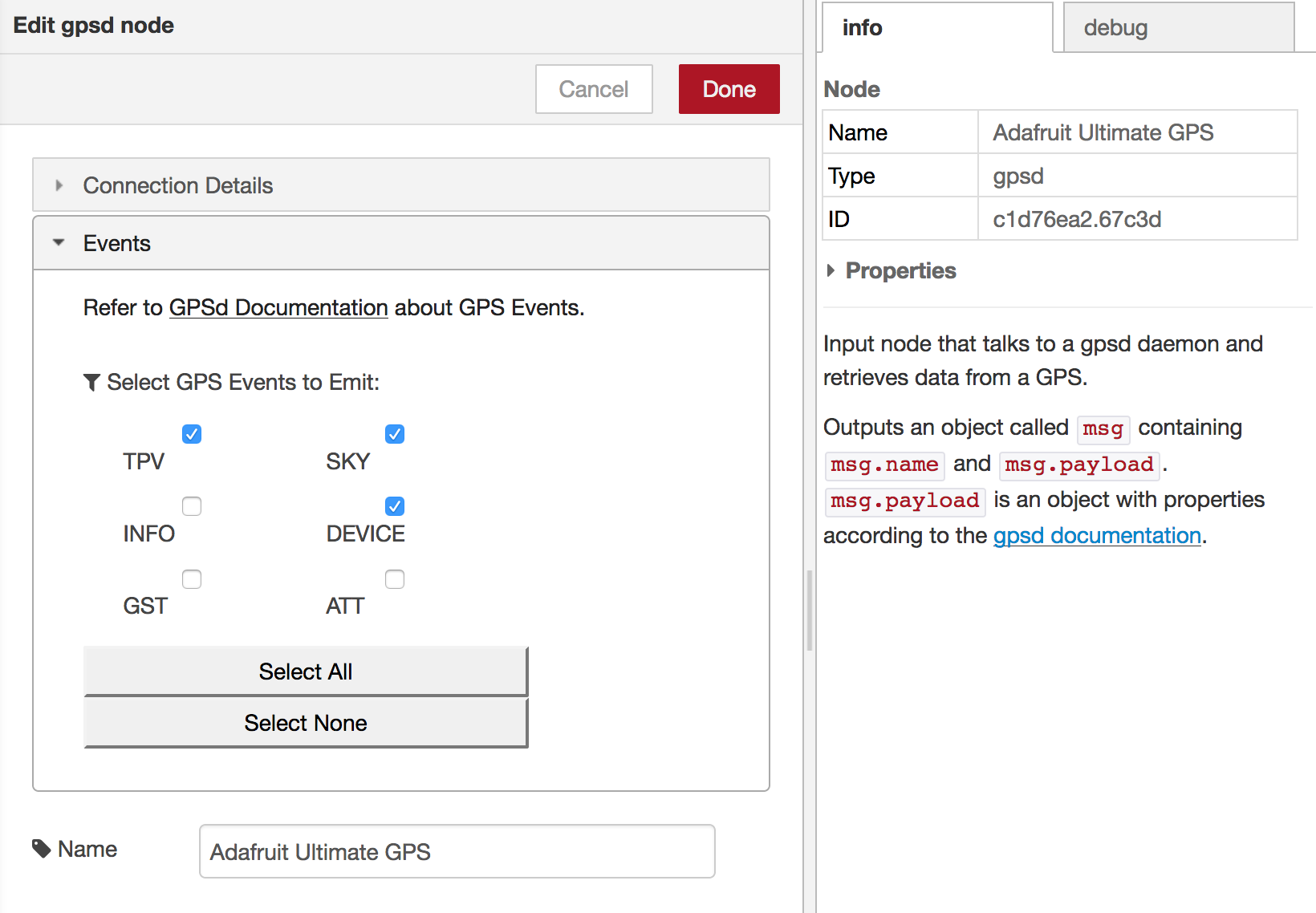
Events
The gpsd node allows you to specify which GPS events you would like it to
emit via msg.payload. These events are
well documented, along with an
explanation of field names and values, but again for TL;DR
TPV - A TPV object is a time-position-velocity report. The "class" and "mode" fields will reliably be present. The "mode" field will be emitted before optional fields that may be absent when there is no fix. Error estimates will be emitted after the fix components they're associated with. Others may be reported or not depending on the fix quality.
SKY - A SKY object reports a sky view of the GPS satellite positions. If there is no GPS device available, or no skyview has been reported yet, only the "class" field will reliably be present.
GST - A GST object is a pseudorange noise report.
ATT - An ATT object is a vehicle-attitude report. It is returned by digital-compass and gyroscope sensors; depending on device, it may include: heading, pitch, roll, yaw, gyroscope, and magnetic-field readings. Because such sensors are often bundled as part of marine-navigation systems, the ATT response may also include water depth.
INFO - Returns an object with details such as Public release level, Internal revision-control level, API major revision level, API minor revision level, and URL of the remote daemon reporting this version. If empty, this is the version of the local daemon.
TODO
A TODO List of possible future features is included. Contributions welcome.
Licence
Copyright (c) 2016 Damien Clark, Damo's World
Licenced under the terms of the
GPLv3

THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL DAMIEN CLARK BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Acknowledgements
Like others who stand on the shoulders of giants, I'd like to acknowledge the contributions of the following people/groups without which, more directly, this modest Node-RED node would not be possible.
- Contributors to GPSd
- Eelco Cramer of node-gpsd, and,
- Pascal Deschenes of the Bancroft Project.